
|
|
The struggle of this year’s competition is all
about the different switches. To fight it, our highly performing mechanic’s
team designed a robotic arm that could pick the balls and activate the scale and
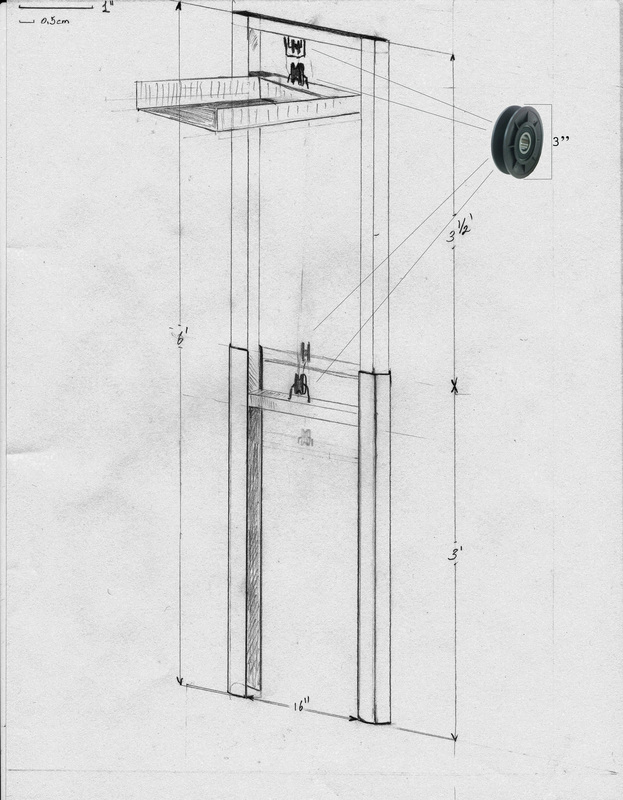
the pushing switch. Sadly, our design was so complex that we needed to 3D print it, which would have cost too much. we chose to go with the traditional lift that you can see on the second picture. As for the wheel, we decided to go with friction and
activate it with another wheel, fixed at the right height.
|

|

|
As for picking up balls, we chose performance over
creativity, and used a mechanism that has been very present in past
competitions. We used adhesive treads to guide the balls and bring them to the claw of the robotic arm. We fixed tie wraps around two axes that spin to pick the balls faster and lead them to the treads, so our robots could pick them from far, without having to stop.
|

|

|

|
Since points are given for the fastest robot, we
chose to use motors faster and less powerful to move the robot around. Last year, we used the bane bots motor to move our robot, and it was incredibly slow. We are not making the same mistake twice, and are using drills' motors. We also pick omni directional wheels for the front, so we do not need 4 motors to move the robot around.
|
